In this post I will write something about fundamental definitions in Physics with regard to (Classical) Mechanics. Classical Mechanics is based on the concepts absolute space and absolute time. A position in the absolute space is denoted as  and time is denoted as
and time is denoted as  . Any particular mass
. Any particular mass  has a path that is described simply as a mapping
has a path that is described simply as a mapping  from the absolute time to the absolute space, given by
from the absolute time to the absolute space, given by
(1)  ,
,
assuming that the absolute space has dimension 3. The interval-velocity is simply defined as a change in position during a time-interval and by definition it is given by:
(2a)  ,
,
where  is defined as
is defined as  . A special interval-velocity is given when the time-interval tends to zero. Then there is only one time involved and we simply speak about THE velocity (at a given time), following the definition we have
. A special interval-velocity is given when the time-interval tends to zero. Then there is only one time involved and we simply speak about THE velocity (at a given time), following the definition we have
(2b)  ,
,
which is normally denoted as  . similar we have a definition of the interval-acceleration, it is simply defined as a change in velocity during a time-interval and by definition it is given by:
. similar we have a definition of the interval-acceleration, it is simply defined as a change in velocity during a time-interval and by definition it is given by:
(3a)  ,
,
where  is defined as
is defined as  . A special interval-acceleration is given when the time-interval tends to zero. Then there is only one time involved and we simply speak about THE acceleration (at a given time), following the definition we have
. A special interval-acceleration is given when the time-interval tends to zero. Then there is only one time involved and we simply speak about THE acceleration (at a given time), following the definition we have
(3b)  ,
,
which is normally denoted as  . Note that we might also write
. Note that we might also write  and
and  . Combination gives
. Combination gives  . More there is a convention that
. More there is a convention that  , so we obtain by definition and convention the following relations:
, so we obtain by definition and convention the following relations:
(4) 
We call  the first order and
the first order and  the second order. Classical Mechanics only used the first and the second order. However modern Mechanics uses higher orders as well. The following table gives an idea of the used orders and the used symbols:
the second order. Classical Mechanics only used the first and the second order. However modern Mechanics uses higher orders as well. The following table gives an idea of the used orders and the used symbols:
(5) 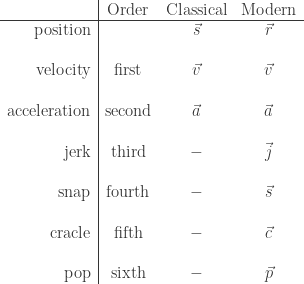
Important is that the symbols might conflict as  might be momentum as well as the pop. However when we restrict to the symbols of Classical Mechanics then there is no conflict in the symbols.
might be momentum as well as the pop. However when we restrict to the symbols of Classical Mechanics then there is no conflict in the symbols.
The general idea is to speak of an average-foo during a time-interval that is defined as the change in bar during a particular time-interval. There are certain relations between the foo and the bar, given by:
(6) 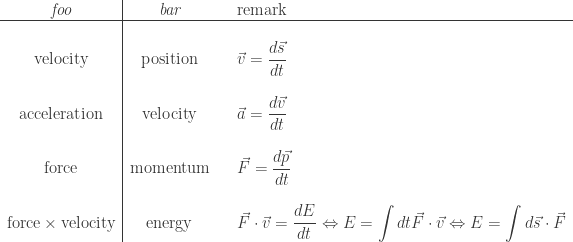
Note that momentum is defined as  . Then it is clear that the force by definition is given by
. Then it is clear that the force by definition is given by  . Therefore we obtain in general
. Therefore we obtain in general 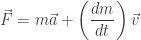 . So only IF
. So only IF  we MAY write
we MAY write  . Assuming that the mass only depends on time, position and velocity, we may write in general
. Assuming that the mass only depends on time, position and velocity, we may write in general
(7)  .
.
It is interesting to note that  IF the mass only depends on time, position and velocity. In this case it is clear that whenever we obtain
IF the mass only depends on time, position and velocity. In this case it is clear that whenever we obtain
(8) 
then we might actually write .
Interesting to note is the relation  . As and , we obtain
. As and , we obtain
(9)  ,
,
thus
(10)  ,
,
where  . Therefore we obtain
. Therefore we obtain
(11)  .
.
The case  gives that
gives that  , which gives for
, which gives for  the relation
the relation  , where
, where  , also known as the Classical Kinetic Energy. Sofar some definitions involving Classical Mechanics.
, also known as the Classical Kinetic Energy. Sofar some definitions involving Classical Mechanics.


Interesting idea about dm/dt. Are you able to prove that dm/dt is zero?
I have proved that dm/dv=0 but never thought about dm/dt. Very interesting idea. you are welcome to take a look at my proof.
http://vixra.org/abs/1802.0010